FEDOR
| FEDOR | |
|---|---|
 фото Habr.com | |
| Тип |
Антропоморфный робот |
| Разработчик |
Россия |
| Производитель |
НПО «Андроидная техника» |
| Первый полёт | |
| Начало эксплуатации | |
| Конец эксплуатации | |
| Эксплуатанты | |
| Единиц произведено |
1 |
FEDOR (Final Experimental Demonstration Object Research) — российский многоцелевой антропоморфный робот, аватар. Был разработан НПО «Андроидная техника» в сотрудничестве с Фондом перспективных исследований. Стал первым российским роботом, осуществившим автономный полёт в космическом корабле на МКС и дальнейшую работу на орбите 27 августа 2019 года с позывным Skybot F-850.
История создания[править]
Конструкторы и разработчики[править]
FEDOR был разработан магнитогорским научно-производственным объединением «Андроидная техника» по заказу Фонда перспективных исследований, став результатом эволюции ряда роботизированных платформ изначально не имевших нижних конечностей и представлявших собой торсовые конструкции для стационарной работы. Как отмечал руководитель проекта Национального центра развития технологий и базовых элементов робототехники ФПИ Сергей Хурс, «Андроидная техника» была выбрана как партнёр ФПИ из прочих 15 претендентов как наиболее опытная и перспективная: на её счету уже были около 50 созданных роботов для различных заказчиков, а собственный бюджет насчитывал в 2014—2016 годах около 500 миллонов рублей.
Итоговая версия FEDORa была представлена в августе 2016 года. Как сообщили разработчики, после принятия решения об отправке робота в космос, работы стали вестись в тесном взаимодействии с «Роскосмосом», ракетно-космической корпорацией «Энергия», научным институтом ЦНИИМаш и Центром подготовки космонавтов.[1]
Предшественники[править]

Прямыми предшественниками платформы FEDOR были торсовые манипуляторы SAR-400 и SAR-401.
Информация о рабочем образце робота, способного выполнять мелкие операции с помощью манипуляторов, появилась в 2012 году. Было заявлено, что робот SAR-400 предназначен для работы в открытом космосе, может как управляться оператором, так и выполнять автономно несложные действия — закручивать шурупы, обследовать обшивку в поисках трещин и т. п. SAR-400 стал первым роботом космического назначения после манипулятора, разработанного для челнока «Буран» ещё в СССР.[2]
Модернизированной версией SAR-400 стал SAR-401, появившийся в 2013 году — новая модификация стала более сильной и способной к расширенному кругу операций, требующих напряжения «рук». Оба они отличались от робота FEDOR отсутствием нижних конечностей и не могли перемещаться самостоятельно, а также гидравлическим приводом манипуляторов.
Назначение и возможности[править]
Назначением робота FEDOR (версии с нижним конечностями и возможностью самостоятельного передвижения) при разработке было не только потенциальное участие в работе на орбите, но и широкий спектр земных задач, связанных с работой в опасных средах и ситуациях в рамках проекта «Спасатель» для МЧС России. Целью была отработка возможностей технического зрения, мелкой моторики и, главное, управления на базе копирующей сенсорики с обратными связями.
После завершения работ над итоговой версией в 2016 году, результаты проекта FEDOR были переданы сразу в два ведомств потенциальных заказчиков — «Роскосмос» и «Росатом».[3]
Космическое перепрофилирование[править]
После окончательного выбора именно космического назначения платформы, её пришлось подвернуть ряду изменений для соответствия требованиям работы в космосе и полётов на космических кораблях.
"Так как «Федор» изначально не проектировался под условия работы в космосе, нам пришлось основательно поработать над его усовершенствованием и приведением к минимальным требованиям действующих стандартов для научной аппаратуры, направляемой на орбиту. Нам пришлось полностью «перебрать» «Федора», поменять кабели, компьютеры, контроллеры, видеокамеры, частично заменить двигатели и редукторы, изготовить новые пластиковые элементы из специального пластика, допущенного для космического применения, и многое другое" — рассказывал исполнительный директор «Андроидной техники» Евгений Дудоров.
Существенные изменения претерпели и размерные показатели робота: уменьшен вес со 160 до 105 килограмм, чтобы уложиться в жёсткие требования к пассажирам космических кораблей «Союз»; ширина плечевого пояса была уменьшена до 48 сантиметров. Штатный ложемент космонавта в корабле «Союз МС-14» как слишком маленький был также заменён специально изготовленным креслом-рамой.
Устройство[править]
Программная составляющая[править]
FEDOR работает под управлением операционной системы Linux, в которую были внесены существенные доработки для улучшения взаимодействия в реальном времени. Управляющее программное обеспечение были написано на языках C++, C# и Python.
Электронная составляющая[править]
Роботом управляет одноплатный компьютер, сочетающий высокую производительность, малые размеры и отсутствие необходимости в системе охлаждения. Большая часть электронных компонентов собирается на санкт-петербургских предприятиях «Абрис-Технолоджи» и Silicium.[4]
Система управления[править]
FEDOR способен действовать в двух режимах — автономном и копирующем. Первый нужен для выполнения относительно несложных задач, а второй — для действий, связанных с мелкой моторикой и специфическими операциями, требующими человеческий интеллект.
Удалённое управление роботом осуществляется с помощью специального костюма, в который облачается оператор. Благодаря 3D-очкам он видит всё «глазами робота», получая визуальную информацию с видеокамер FEDORа. Костюм оснащён большим количеством датчиков, считывающих движение с основных двигательных точек — пальцев, кистей, предплечий и рук целиком. Существует также вариант оснащения управляющего костюма системой обратной связи, которая сообщает степень усилия и сопротивления предметов, которыми оперирует робот. По заявлению создателей робота, им удавалось управлять на расстоянии до 4 тысяч километров (правда, с небольшой задержкой при передаче данных и ответных действиях).[5]
Процесс управления в деталях описывается так: «Для обеспечения безопасности во время проведения экспериментов управление роботом осуществляется в режиме аватара, с помощью задающего устройства копирующего типа (ЗУКТ), который подключается к ноутбуку через USB соединение. На ноутбуке запущена система управления (СУ), передающая управляющее воздействие на робота через Ethernet. Робот и ЗУКТ будут находиться на МКС. ЗУКТ представляет собой металлический каркас с 32 степенями подвижности. Каркас крепится к оператору посредством лямок и специальных перчаток, которые позволяют отслеживать положение пальцев оператора. В каждой степени подвижности установлен 12-битный датчик углового положения, что позволяет измерять относительные углы поворота с точностью до одной десятой градуса».[6]
Сенсоры и датчики[править]
FEDOR оснащён следующим набором «органов чувств»:
— две видеокамеры
— микрофон
— датчики навигационных систем GPS и ГЛОНАСС
— около 15 лазерных дальномеров
— гироскопической системой определения положения собственного тела из 48 датчиков, 2 акселерометров и двух датчиков давления
Получаемая от сенсоров информация попадает в систему распознавания объектов, которая способна различать типовые объекты, предметы и инструменты, а также препятствия, создавая трёхмерную схему окружающей обстановки, на базе которой робот принимает решение о том, как оперировать с окружающим миром.[7]
Любопытно, что видеоканалы робота могут работать не только совместно (стереоскопически), но и раздельно — для выполнения двух рабочих задач одновременно.[8]
Опорно-двигательный аппарат[править]
Робот состоит из следующих деталей:
— головной модуль;
— корпусный модуль;
— модуль манипулятора — 2 шт.
— модуль захвата — 2 шт.
— опорный модуль — 2 шт.
Всего Fedor состоит из 15 тысяч деталей, из которых отечественных — около 75 %.
«Скелет» и «суставы» робота обладают 72 степенями свободы. Редукторы, бесколлекторные моментные двигатели и другие элементы двигательной системы сначала использовались импортные, а после запрета на поставки были заменены устройствами собственной разработки. Всего в роботе 48 двигателей.
Силовая установка и питание[править]
Силовая установка обладает мощностью 13,5 кВт (20 лошадиных сил).
Система питания электроэнергией — двойная: по кабелю и от встроенного аккумулятора. При подготовке к космической миссии встроенные АКБ были использованы от скафандра «Орлан», в количестве двух штук.[9]
Для избежания быстрого охлаждения при низких температурах, робот оснащён системой подогрева важных узлов.
Физические параметры[править]
Вес — 160 кг (105 в космической версии).
Рост — 184 см.
Ширина плеч — около 52 см (48 в космической версии).
Возможности, навыки и умения[править]
Повторяя моторику человеческого организма и управляясь удалённо в режиме «аватар», в котором робот точно копирует движения оператора, FEDOR с той или иной степенью ловкости способен воспроизвести все обычные для человека действия.
Подвижность[править]
FEDOR способен ходить по ровной и пересечённой местности, подниматься по лестнице, а также передвигаться на четвереньках и ползти по-пластунски, перемещаясь под различными препятствиями. Вместе с тем, стоит отметить, что FEDOR не настолько мобилен как американские роботы компании Boston Dynamics и не может бегать и прыгать (что, впрочем, и не входило в его задачи при разработке). Однако он достаточно устойчив и способен восстановить собственное равновесие при толчке или другом внешнем воздействии. FEDOR способен также сесть на продольный или поперечный шпагат, и отжиматься от пола.[10] Ещё одна интересная особенность — гибкая шея, позволяющая смотреть вертикально вверх.[11]
Оперирование механизмами[править]
Сильной стороной FEDOR являются операции с помощью «рук» — мелкая моторика манипуляторов позволяет выполнять такие операции как пайка микросхем, открывание двери с помощью ключа, использование пилы, молотка, огнетушителя, дрели и любых других инструментов, используемых человеком. На испытаниях робот успешно справлялся с вращательными движениями — открыванием вентилей, вращением рулевого колеса автомобиля, а также с полноценным управлением им (а также — квадроцикла) с помощью педалей и ручки КПП. Создатели также утверждают, что FEDOR может выполнять медицинские манипуляции — делать уколы и накладывать шины.[12]
В апреле 2017 года FEDOR продемонстрировал стрельбу из пистолетов «по-македонски», то есть — с двух рук. При этом прицеливание и ведение огня велось в автоматическом режиме, без управления оператором. Как прокомментировал это Дмитрий Рогозин, «мы не терминатора создаём», а стрельба была призвана ускорить развития роботом собственной мелкой моторики, однако этот прецедент привёл к отказы иностранных компаний поставлять создателям FEDOR ряд комплектующих для робота, которые впоследствии были заменены российскими аналогами.[13]
FEDOR продемонстрировал возможность поднять одной рукой вес до 20 килограмм.[14]
Обратная связь с людьми[править]
Изначально FEDOR не имел голосового модуля, однако накануне своей космической миссии он был установлен для общения с экипажем МКС.
Программное обеспечение позволило роботу говорить только на русском языке, однако разработчики отметили, что его речь может включать в себя элементы неожиданности: «Его ответы не всегда предсказуемы. Это просьба „Роскосмоса“. Чтобы космонавтам было весело с ним общаться. Так что в его ответы заложены недокументированные возможности. Так называемые пасхалки. Посмотрим, как это всё отработает».[15] Было также уточнено, что ненормативной лексике FEDOR не обучен.
В ноябре 2019 года появилась информация, что робота готовят к использованию английского и китайского языков.[16]
Стоимость[править]
Совокупная стоимость всех работ, связанных с работами на платформой FEDOR, не разглашается. В СМИ упоминалось, что всего было потрачено около 300 миллионов рублей. Более конкретно Евгений Дудоров говорил о 25 миллионах рублей, которые были потрачены на комплектующие робота.[17] Он также уточнил, что FEDOR стоил намного дешевле своего американского аналога Atlas стоимостью 18 миллионов долларов: «Мы такого подсчета не проводили, но точно могу сказать, что намного меньше, в разы».[18]
Миссия Skybot F-850[править]
См. основную статью Миссия Skybot F-850
Дальнейшее развитие проекта[править]
«Испытатель»[править]
Дальнейшее развитие робота FEDOR получило название «Испытатель» — роботы этой модификации будут собраны целиком из российских комплектующих и будут предназначены для полёта на космическом корабле «Федерация» и работы с большим количеством космической техники на МКС. В ноябре 2019 года представители НПО «Андроидная техника» анонсировали планы создать также следующую версию «Испытателя» — «Испытатель-2», которая в 2036—2040 годах должна будет отправиться на российскую лунную базу.[19]
«Теледроид»[править]
«Теледроид» — торсовый робот, не имеющий нижних конечностей, предназначенный для работы в открытом космосе на внешней части космического корабля или МКС. Предполагается, что робот получит компонентную базу, способную выдерживать отрицательные температуры, вакуум и солнечную радиацию, а работать будет в режиме «аватара», копируя движения оператора и избавляя его от необходимости покидать корабль. В планах — создание нескольких роботов, которые будут подвергнуты жёстким испытаниям на земле с целью выяснить предел их прочности.[20] Также отмечается, что конструкция, базирующаяся на основе торса FEDORa получит гораздо более высокий уровень надежности.
Иностранные аналоги[править]
Существуют различные иностранные человекоподобные роботы, по тем или иным критериям могущими считаться аналогами платформы FEDOR. Все они имеют по сравнению с ней определённые достоинства и недостатки.
Космический «конкурент» российского робота — американский Robonaut], напоминающий ранние, безногие версии российского робота, SAR-400 и SAR-401. В 2011 году он отправился на МКС для апробирования работы в условиях невесомости. В 2014 году у Robonaut появилась пара нижних конечностей, которые доставили на МКС на грузовом корабле и больше напоминали вторую пару рук, так как обладали большим количеством суставов и степеней подвижности. Эта версия получила название Robonaut 2.[21]
Робот Atlas компании Bosotn Dynamics в космосе не работал, однако благодаря СМИ стал самым известным и продвинутым роботом-гуманоидом, способным повторять почти все человеческие движения. Однако, превосходя FEDORa в подвижности, он уступает ему в мелкой моторике — «Американский полувоенный концепт ATLAS тоже на орбиту не летал. Он развивается под эгидой фондаDARPA компанией Boston Dynamics с 1989 года. Сначала там работали с четырехногими системами для перемещения тяжелых грузов, боеприпасов в полевых условиях. С 2010 года они начали развивать двуногие платформы. Стартовали также с армейских заказов. Их исследования смещены в сторону прямохождения, поддержания равновесия, ходьбы по пересеченной местности. То есть развиваются те функции, которые помогут роботам быть мобильными. Наш концепт — более прикладной. Если у ATLAS 28 степеней подвижности, у нашего ФЕДОРа — 46. Нашему нужны руки, которые могут выполнять конкретную работу» — полагает Евгений Дудоров.[22]
Японский робот Asimo может считаться близким к FEDORу проектом только технически, а не функционально, так спроектирован не для работы в опасных условиях или космосе, а для сервисных услуг и ухода за людьми.
Фотогалерея[править]
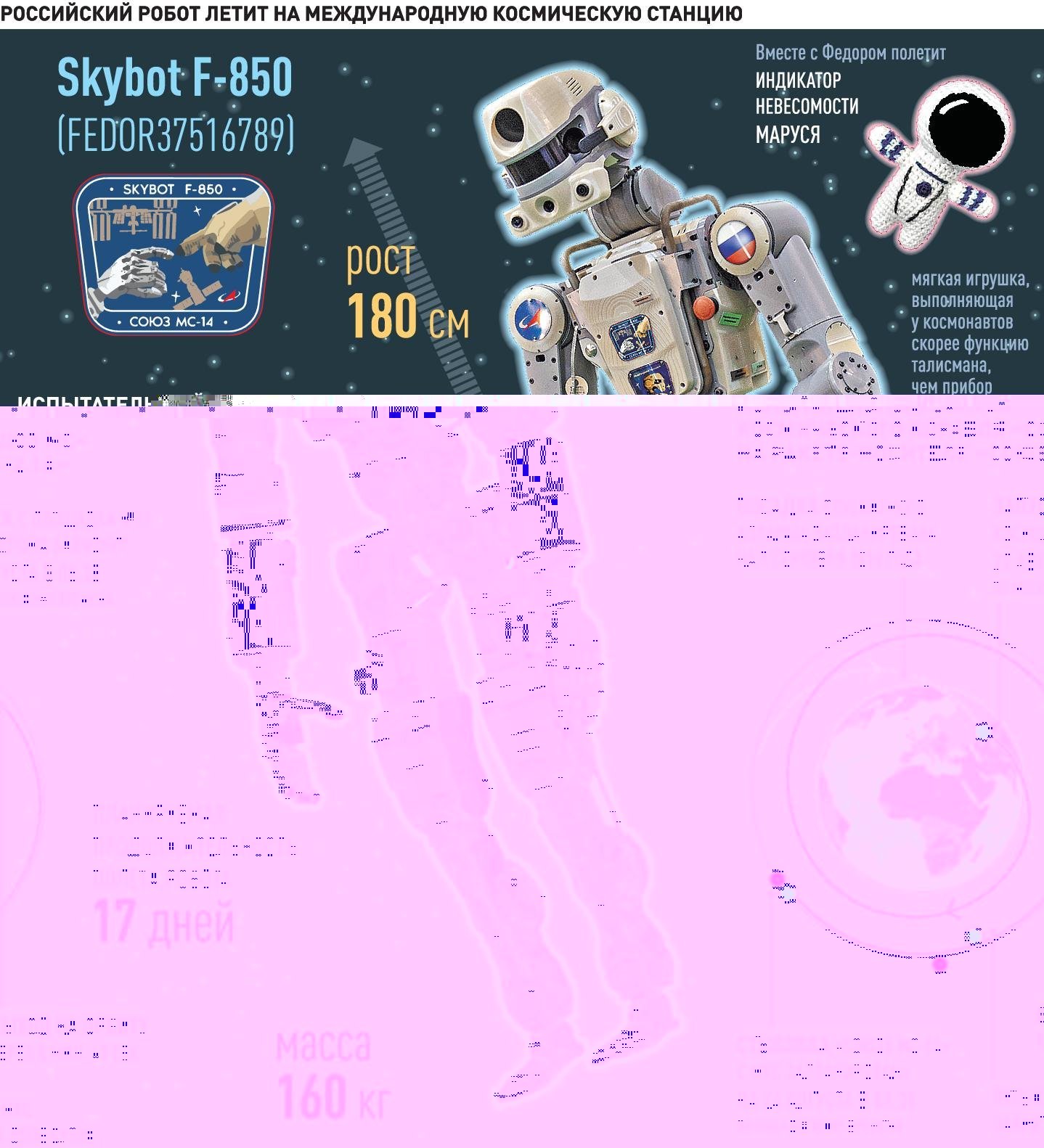
Инфографика миссии Skybot F-850. Фото Rg.ru

Управление в копирующем режиме

Стрельба из пистолетов. Фото Mail.ru

Вождение автомобиля




См. также[править]
Источники[править]
- ↑ https://ria.ru/20190227/1551381510.html
- ↑ https://iz.ru/news/517611
- ↑ https://dfnc.ru/kosmos/fedor-robot-poletel-v-kosmos/
- ↑ https://www.roscosmos.ru/media/img/2019/OKT/rk2019-09.pdf
- ↑ https://www.mk.ru/science/2016/10/09/razrabotchiki-raskryli-tayny-robota-fedora-delaet-ukoly-poletit-k-sputnikam.html
- ↑ https://dfnc.ru/kosmos/fedor-robot-poletel-v-kosmos/
- ↑ https://robo-sapiens.ru/stati/robot-fedor/
- ↑ https://habr.com/ru/post/457066/
- ↑ https://dfnc.ru/kosmos/fedor-robot-poletel-v-kosmos/
- ↑ https://robo-hunter.com/news/chto-umeet-robot-fedor6692
- ↑ https://habr.com/ru/post/455204/
- ↑ https://robo-sapiens.ru/stati/robot-fedor/
- ↑ https://www.popmech.ru/technologies/news-465962-robot-fyodor-postradal-iz-za-strelby/
- ↑ https://www.mk.ru/science/2016/10/09/razrabotchiki-raskryli-tayny-robota-fedora-delaet-ukoly-poletit-k-sputnikam.html
- ↑ https://iz.ru/912430/anna-urmantceva/v-robota-fedora-zalozheny-sekretnye-vozmozhnosti
- ↑ https://life.ru/p/1254666
- ↑ https://www.rbc.ru/magazine/2018/01/5a3948139a794769dd2a086c
- ↑ https://ria.ru/20190227/1551381510.html
- ↑ https://ria.ru/20191113/1560895842.html
- ↑ https://iz.ru/912430/anna-urmantceva/v-robota-fedora-zalozheny-sekretnye-vozmozhnosti
- ↑ https://www.dailytechinfo.org/space/6248-robot-robonaut-nahodyaschiysya-na-kosmicheskoy-stancii-poluchil-paru-svoih-nog.html
- ↑ https://www.mk.ru/science/2016/10/09/razrabotchiki-raskryli-tayny-robota-fedora-delaet-ukoly-poletit-k-sputnikam.html
Ссылки[править]
↑ | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Теория |
Голономность • Мехатроника • Обратная связь (отрицательная, силовая (силомоментная), тактильная) • Силовое телеприсутствие • Тактильно-силовое телеприсутствие • Тактильный пиксель | ||||||||
| Приборы | |||||||||
| Роботы |
| ||||||||
| Связанные термины |
Групповая робототехника • Устройство телеприсутствия • Киборг • Шагоход • Мех (бронетехника) | ||||||||
| Прочее |
Robotics Expo • Соревнования по подводной робототехнике • Робокоп • Убийство роботом человека | ||||||||